La paternità della tecnologia Pulse Induction ("Induzione d'impulso") applicata al metal detecting hobbistico può essere senz'altro attribuita a geniale ingegnere Eric Foster che negli anni '70 e '80 diede un contributo agli studi e alla realizzazione dei primi modelli PI utilizzabili per i nostri scopi.
Cercherò di dare una spiegazione il più possibile semplice e, lo spero, non troppo noiosa.
Il principio di base è questo... Immaginate di avere una batteria carica e collegatela un interruttore che, ritmicamente, si apre e si chiude.
Prendete questo voltaggio e applicatelo ad una bobina di rame con X avvolgimenti. Ciò che accade è che si genererà un campo elettromagnetico variabile ad alta intensità (quando l'interruttore è aperto la bobina riceve il massimo voltaggio e il massimo amperaggio dalla batteria) che si propaga sopra e sotto la piastra.
Abbiamo creato, un "treno di impulsi" ad alta energia che genera un campo elettromagnetico variabile anch'esso di grande potenza.
Fino a qui non siamo andati troppo lontani dal sistema VLF/IB che invece di usare degli impulsi, usa delle onde sinusoidali (nei modelli monofrequenza) o delle onde rettangolari (molto simili agli impulsi ma che verranno poi analizzate in modo diverso - per i modelli multifrequenza o BBS/FBS).
La peculiarità dei sistemi Pulse Induction, oltre all'appena menzionato modo di generare i campi elettromagnetici, sono soprattutto legate a come i segnali vengono analizzati quando passeremo alla fase di ricezione del segnale.
Iniziamo subito col dire che la principale differenza tra VLF/IB e PI sta nel fatto che i primi analizzano le variazioni di ampiezza e FREQUENZA (la cosiddetta fase) del segnale ricevuto, mentre i secondi analizzano come, NEL TEMPO, decade il segnale a seconda del tipo di target intercettato. I VLF/IB si dicono infatti "Operanti nel Dominio della Frequenza" mentre i Pulse Induction "Operanti nel Dominio del Tempo” proprio per distinguere nettamente le modalità operative di base delle due tecnologie.
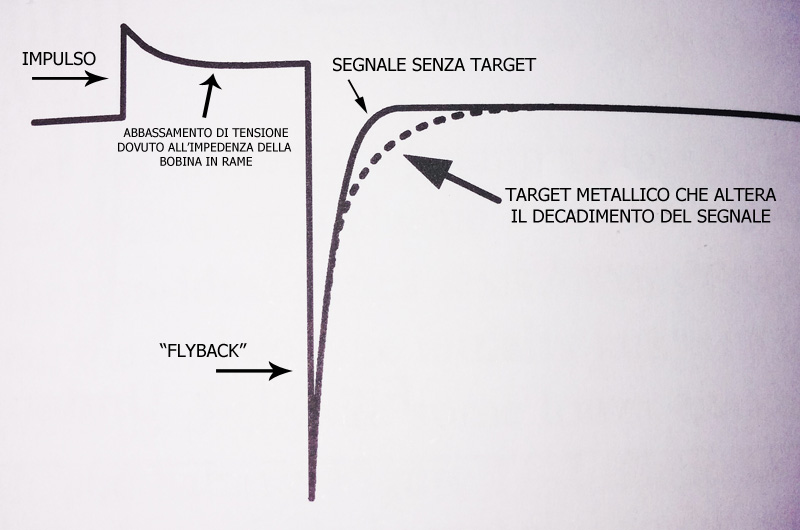
Ma vediamo con un grafico cosa accade quando un metal detector Pulse Induction emette uno dei tanti impulsi ad alta energia (per semplicità ho preso dal libro “INSIDE THE METAL DETECTOR” questa immagine e l’ho modificata con alcuni miei commenti):
In questo semplice grafico potremo osservare diverse cose interessanti che riguardano la tecnologia PULSE.
 www.amdtt.it/wp-content/uploads/2016/07/PULSE-INDUCTION.jpg
www.amdtt.it/wp-content/uploads/2016/07/PULSE-INDUCTION.jpgSe guardiamo il grafico qui sopra vedremo che il segnale parte da un livello ZERO e sale al livello di picco superiore quando l’interruttore si chiude e tutta la corrente della batteria viene inviato alla bobina.
Raggiunto il valore massimo, tende a diminuire un po’ per via della resistenza/impedenza della bobina e si assesta ad un valore leggermente inferiore del massimo.
A questo punto l’interruttore si apre e cessa l’erogazione di corrente alla bobina. In questo istante accade qualcosa di molto particolare. Il voltaggio, invece di tornare a valore ZERO, come ci aspetteremo, per un particolare effetto fisico ha un elevatissimo picco di segno opposto.
Come potete vedere infatti il segnale scende tantissimo sotto lo zero. Dopo qualche istante inizia a risalire per raggiungere lo zero. Questa risalita si chiama in termini tecnici “Flyback” (che possiamo tradurre (male) come “volo di ritorno”). Il Flyback, come potete vedere nel grafico, non è istantaneo ma ci mette un tot di tempo e infatti la linea non è verticale ma è leggermente curva. Una volta assestato, il livello è nuovamente ZERO e il detector è pronto per il prossimo impulso.
Ma cosa accade se il campo elettromagnetico generato dagli impulsi incontra un target metallico?
Semplicemente indurrà sulla loro superficie un campo elettrico alternato che, a sua volta, genererà un campo elettromagnetico secondario che andrà a “disturbare” quello primario emesso dalla bobina trasmittente. Questo disturbo implicherà una modificazione del tempo con il quale il Flyback passerà dal picco negativo allo ZERO, andando a modificare la curva e che ora diventerà quella tratteggiata.
Se noi campioniamo il segnale dopo un certo tempo T successivo alla apertura dell’interruttore e vedremo che c’è una differenza tra il segnale normale e quello che riceviamo, avremo la certezza che, appunto, il detector ha intercettato un target metallico.
Il bello dei Pulse è che questi campi elettromagnetici hanno una intensità notevolmente maggiore rispetto a quelli dei VLF ed è per questo che sono in grado, specie sui terreni mineralizzati, di raggiungere profondità nettamente superiori.
Il rovescio della medaglia? Metalli differenti producono variazioni delle curve di Flyback non troppo grandi e quindi è difficile analizzare queste differenze, dato che sono spesso minime, e quindi identificare bene il tipo di metallo che abbiamo rilevato.
Da qui la proverbiale poca efficienza dei Pulse nella discriminazione.
Ma è possibile migliorare la cosa attraverso un intelligente stratagemma che, sebbene non perfetto, molto spesso produce discreti risultati.
Partiamo con degli esempi semplici…
Gli oggetti di ferri hanno un periodo di magnetizzazione residua molto breve e quindi la curva di Flyback sarà molto più ripida rispetto a quella degli oggetti ad alta conduttività come rame e argento, dove la curva Flyback è più “panciuta” e lenta a risalire (parliamo sempre nell’ordine dei microsecondi!)
Se noi modifichiamo il momento di campionamento, ritardandolo un pochino rispetto al normale, la nostra analisi “taglierà fuori” in un certo senso i target ferrosi perché, se analizziamo in ritardo il segnale, la curva generata dall’oggetto ferroso sarà tornata ad una forma sostanzialmente identica a quella che si ha senza target. Se invece passeremo la piastra su un target NON FERROSO, con un campionamento in ritardo avremo ancora una curva piuttosto … “curva”… e scusate il gioco di parole. Ecco quindi che è possibile effettuare un minimo di discriminazione anche con il Pulse, attraverso quello che si chiama tecnicamente “Pulse o Sample Delay” che non è altro che un ritardo regolabile dall’utente del momento in cui andremo a campionare il segnale.
Altra particolarità dei PI è quello di avere la possibilità di funzionare sia con una bobina sola, che alternativamente trasmette e poi, successivamente, riceve il segnale che con 2 bobine (di solito in configurazione DD) per migliorare la gestione della mineralizzazione del terreno.
Potremmo anche parlare dei sistemi di bilanciamento che possono essere introdotti anche nei Pulse ma per il momento credo che come prima infarinatura ci siamo…
Ovviamente resto a disposizione per qualsiasi chiarimento…
Leonardo Ciocca
AMD Tech Teamwww.amdtt.it









 Quanto alle piastre, secondo te si può guadagnare qualcosa in termini di prestazioni cambiando piastra su questi md?
Quanto alle piastre, secondo te si può guadagnare qualcosa in termini di prestazioni cambiando piastra su questi md?